类型:
标签:
版本:
1.0
系统:
4.0及以上
大小:
1.62MB
资源:
完全免费

蓝牙小车app是一款专为Arduino自平衡小车设计的智能遥控软件,支持通过蓝牙或WiFi连接安卓手机与智能小车。这款应用不仅操作简单,还具备重力感应功能,让用户可以轻松实现对小车的精准控制。无论是前进、后退还是转向,都能通过手机一键完成。此外,软件还支持自定义控制编码,兼容HC05/HC06等主流蓝牙模块,是Arduino爱好者开发智能小车的理想选择。欢迎有需要的用户前往IT猫扑下载体验!
蓝牙小车app是一款功能强大的智能小车控制软件,专为HC05/HC06蓝牙模块设计。它不仅支持重力感应操控,还能让用户自定义控制编码,协议简单且接入方便。无论是初学者还是资深开发者,都能快速上手。作为Arduino蓝牙小车的可靠选择,这款软件为智能小车开发提供了极大的便利,让遥控体验更加流畅和高效。
采用手机蓝牙功能遥控小车,实现远距离操控;支持控制玩具车灯光的开关,增加趣味性;内置重力感应操控方式,让控制更加直观;精准控制小车的前后左右动作,提升操作体验。此外,软件还支持自定义按键功能,满足不同用户的个性化需求。
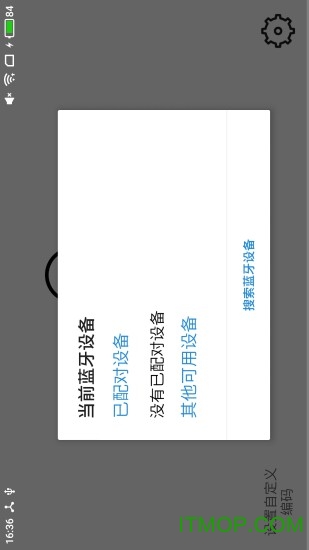
此软件需配合带有蓝牙模块的遥控车使用。首先在手机系统设置中配对蓝牙小车,默认配对码为“0000”。配对成功后,打开软件并连接对应的蓝牙模块,即可开始控制小车。软件界面简洁明了,操作简单,即使是新手也能快速掌握。更多详细教程和配件购买信息,请访问相关链接。
教程见:http://www.3dant.cn/index./Home/Help/index
小车DIY配件购买地址:https://item.taobao.com/item.htm?id=523953094755
蓝牙模块需与Arduino主板的串口(TX、RX)连接,具体接线方法请参考调试教程。连接完成后,即可通过智能设备控制小车的运动方向和动作。蓝牙模块的稳定性和兼容性经过严格测试,确保用户能够获得流畅的操控体验。更多购买和调试信息,请访问以下链接。
蓝牙模块使用调试教程请移步:http://www.3dant.cn/index.php/Home/Help/article?id=8
蓝牙模块购买地址:https://item.taobao.com/item.htm?id=524020809762
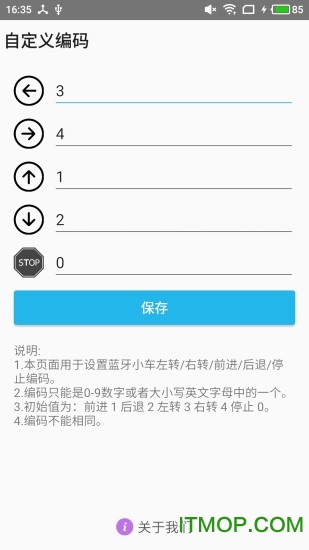
安装“蓝牙串口SPP”软件后,需设置五个功能按钮:GO、BACK、STOP、TurnRight、TurnLeft。每个按钮的OFF和ON状态均需填写按钮名,并设置对应的字符发送功能。例如,GO按钮发送“G”,BACK按钮发送“B”,以此类推。设置完成后,即可通过手机精准控制小车的各项动作。
以下是蓝牙遥控Arduino小车的核心代码,功能包括前进、后退、左转、右转和停止。代码中定义了L298N模块的信号输入引脚,并通过串口接收蓝牙指令。用户可根据实际接线情况调整部分代码,确保小车能够准确响应遥控指令。
/*
蓝牙遥控Arduino小车程序
功能:小车接收到蓝牙模块发送过来的字符“G”前进,字符“B”后退,字符“L”左转,字符“R”右转,字符“S”停止。
By爱之家店2015.11.5
小车DIY配件购买地址:[url]https://item.taobao.com/item.htm?id=523953094755[/url]
*/
const int L298nIn1 = 2; //L298N模块信号输入
const int L298nIn2 = 3;
const int L298nIn3 = 4;
const int L298nIn4 = 5;
const String GO = G; //蓝牙遥控器发送信息代码定义
const String BACK = B;
const String RIGHT = R;
const String LEFT = L;
const String STOP = S;
void setup()
{
pinMode(L298nIn1, OUTPUT);
pinMode(L298nIn2, OUTPUT);
pinMode(L298nIn3, OUTPUT);
pinMode(L298nIn4, OUTPUT);
Serial.begin(9600);
}
void goForward(){ //小车前进
digitalWrite(L298nIn1, HIGH);
digitalWrite(L298nIn2, LOW);
digitalWrite(L298nIn3, LOW);
digitalWrite(L298nIn4, HIGH);
}
void goBack(){ //小车后退
digitalWrite(L298nIn1, LOW);
digitalWrite(L298nIn2, HIGH);
digitalWrite(L298nIn3, HIGH);
digitalWrite(L298nIn4, LOW);
}
void goStop(){ //小车停止
digitalWrite(L298nIn1, LOW);
digitalWrite(L298nIn2, LOW);
digitalWrite(L298nIn3, LOW);
digitalWrite(L298nIn4, LOW);
}
void turnRight(){ //小车右转
digitalWrite(L298nIn1, LOW);
digitalWrite(L298nIn2, HIGH);
digitalWrite(L298nIn3, LOW);
digitalWrite(L298nIn4, HIGH);
}
void turnLeft(){ //小车左转
digitalWrite(L298nIn1, HIGH);
digitalWrite(L298nIn2, LOW);
digitalWrite(L298nIn3, HIGH);
digitalWrite(L298nIn4, LOW);
}
String readTtl(){
String comdata = ;
while (Serial.available())
{
comdata += char(Serial.read());
delay(2);
}
return comdata;
}
void loop() //主循环函数
{
String s = readTtl();
if (s == GO) goForward(); //如果按GO键,小车前进,直到按STOP键停止
if (s == LEFT) turnLeft();
if (s == STOP) goStop();
if (s == RIGHT) turnRight();
if (s == BACK) goBack();
}
修复了部分小错误,进一步提升了软件的稳定性和兼容性。优化了蓝牙连接速度,减少了延迟,让用户能够获得更加流畅的操控体验。